В дискуссиях вокруг статей на сайте часто возникают “терки” по поводу жидкостных ракетных двигателей, их технических характеристик, качества, эффективности и даже происхождения.
Коротко – история
В 1914 году американский ученый, изобретатель и инженер оформил U.S. Patent 1 103 503, описывающий жидкостный ракетный двигатель, работающий на паре бензин и жидкий оксид азота.
Кстати, в том же 1914 году Годдард запатентовал многоступенчатую конструкцию ракет: U.S. Patent 1 102 653.
Годдард запустил свою первую ракету на жидком топливе 16 марта 1926 года. Запись об этом событии в журнале Годдарда звучит так: «Первый полёт ракеты, использующей жидкое топливо, был произведён вчера на ферме тётушки Эффи». Ракета под названием «Нелл» размером с человеческую руку в течение 2,5 с взлетела на высоту около 12 м.
С тех пор немало воды утекло, были разработаны и использованы различные виды жидкого топлива, разработаны и применены различные конструкции двигателей и появилась возможность анализа.
Разные требования к ЖРД нижних и верхних ступеней
Надо совершенно четко понимать, что нижние и верхние ступени ракет работают в разных условиях, которые отражаются в разных требованиях к техническим характеристикам.
Всем очевидно, что орбитальные и суборбитальные ракеты взлетают вертикально. На первом этапе, то есть, во время работы нижней ступени, ракета непосредственно тягой своих ЖРД преодолевает гравитацию планеты и аэродинамическое сопротивление атмосферы.
На втором этапе, когда ракета уже легла на “азимут стрельбы”, двигатели работают на разгон ракеты, увеличивая её скорость, следовательно, наращивается центробежная сила, которая и преодолевает гравитацию планеты. С увеличением высоты полета, также снижается фактор аэродинамических потерь.
Первая ступень.
В соответствии с вышеизложенным, главным показателем первой ступени является тяга двигателей первой ступени, которая должна быть во много раз больше веса ракеты. Это называется тяговооруженностью. И в первую очередь, требуется высокая тяговооруженность двигателя (двигателей). Также, огромное значение имеет сухой вес конструкции ракеты и вес топлива.
Понятно, что сухой вес двигателей и конструкции ракеты являются величинами постоянными, а вес топлива падает по мере его использования двигателями. То есть, вес топлива является переменной величиной, зависящей от удельного расхода компонентов. Понятно, что, чем быстрее ракета теряет вес, тем более высокая разгонная характеристика и возникает более высокое ускорение. В более плотных, нижних слоях атмосферы, более высокая скорость вызывает более высокое аэродинамическое сопротивление, вызывающее более высокие механические нагрузки на конструкцию и более высокие температурные нагрузки.
Что касается температурных нагрузок, то хочу напомнить, что самолет SR-71 на высотах 25-30 км разгонялся до скорости 3,5 М и мог бы больше, но, даже в разреженной стратосфере, трение воздуха разогревало корпус до красного свечения и начинали плавиться резиновые уплотнители остекления кабины пилотов.
Очевидно, что температурные нагрузки также являются существенным фактором.
Мы с вами смотрим запуски космических ракет и прекрасно знаем, что есть момент “максимального аэродинамического сопротивления”. Мы также видим, что для уменьшения аэродинамических нагрузок, двигатели дросселируются, тяга снижается и ракета безопасно преодолевает момент максимального сопротивления атмосферы. После этого, двигатели снова наращивают тягу, поднимая и разгоняя ракету.
Чем более высока тяговооруженность ракеты, чем быстрее двигатели “пожирают” вес топлива, тем раньше и на меньшей высоте возникает максимальное сопротивление. Чтобы оттянуть этот момент и поднять его на большую высоту, ЖРД также дросселируются.
Кроме того, нельзя наращивать ускорение ракеты до перегрузок, которые могут просто раздавить конструкцию, полезную нагрузку или, не дай бог, экипаж космического корабля.
Ну представьте себе, что ракета поднимает ПН весом 100 тонн. При перегрузке 3G это превращается в 300 тонн силы – не всякая конструкция силового каркаса это выдержит.
И это тоже надо учитывать, составляя программу (циклограмму) работы двигателей первой ступени.
Снижение тяги (дросселирование) ЖРД первой ступени, также снижает расход топлива.
Таким образом, можно сделать вывод, что наиболее важными характеристиками ЖРД первой ступени является тяговооруженность, степень дросселирования и управляемость двигателей (современное – читай компьютеры управления). Удельный Импульс (скорость истечения рабочего тела ракетного двигателя – УИ) не является для первой ступени важной характеристикой, а повышение УИ, как характеристики “экономичности” расхода топлива, часто играет отрицательную роль. Чем выше УИ, тем меньше потребление топлива. Это, вроде бы хорошо. Но, с другой стороны, это заставляет тащить больше топлива на большую высоту (особенно в вертикальной фазе полета ракеты). Из физики мы знаем, что термин “работа” означает подъём единицы груза на единицу высоты. То есть, более экономичные ЖРД вынужденно выполняют дополнительную работу, а это снижает показатель весового совершенства всей ракеты.
Вторая (третья) ступень
Тут всё попроще. Верхние ступени включаются на высоте, где сопротивление атмосферы очень незначительно, а ракета практически уже движется почти параллельно поверхности Земли, не преодолевая гравитацию планеты непосредственно тягой двигателей. Собственно, двигатели верхних ступеней работают на разгон ракеты. Более высокая скорость вызывает более высокую центробежную силу, которая и поднимает высоту полета. Именно эта фаза полета более-менее нормально описывается известной “формулой Циолковского”, которую нельзя применять для расчета полета первой ступени.
Фактически, поскольку масса является мерой инерции, тяга двигателей верхних ступеней направлена на преодоление инерции массы покоя оставшейся части ракеты. И тут первостепенное значение имеет уже не тяга (тяговооруженность) двигателей, а их способность наращивать скорость (дельта V) с минимальным расходом топлива. Именно это описывается Удельным Импульсом. Чем выше УИ, тем эффективнее используется топливо, тем дольше может работать верхняя ступень при том же количестве (весе) топлива, тем большее приращение скорости может быть создано тягой двигателей.
К конструктивным особенностям двигателей верхних ступеней относится требование к увеличению размеров сопла. Это очевидно.
Падение внешнего давления (атмосферного давление) вплоть до нуля, создает эффект “размывания” потока исходящего рабочего тела ЖРД, что вызывает снижение эффективности реактивной тяги, создаваемой двигателем. Пока атмосферное давление “сжимает” поток рабочего тела с боков, поток рабочего тела используется с максимальной эффективностью. По мере падения атмосферного давления, исходящий поток разбегается по сторонам, осевая тяга снижается, падает эффективность.


Как вариант борьбы с этим явлением, появилась конструкция клиновоздушного двигателя, в котором искусственно создается направленность потока от периферии к центру. Но это решение также имеет массу недостатков.


Виды жидкого ракетного топлива
С самого начала, конструкторы искали оптимальные виды жидкого топлива и окислителя. Первым, ещё Годдардом, был предложен бензин, окисляемый оксидом азота. Понятно, что конструкторам хочется иметь наиболее энергетически богатый набор топливо/окислитель, наиболее высокую плотность жидкого топлива и окислителя в баках (больше плотность – большее количество в том же объёме), упрощение конструкции двигателя, меньшую взрывоопасность и меньшую токсичность.
Наибольшую энергетичность дает пара водород/кислород. Но плотность жидкого водорода невысока, а значит требует баков большего размера. К тому же криогенное топливо усложняет конструкцию.
Максимальную простоту двигателей дает самовоспламеняющееся топливо (высококипящее) типа гидразина или гептила. Это такие виды топлива, которые воспламеняются от контакта его компонентов – нет необходимости создавать дополнительную систему зажигания.
Но эти виды топлива высоко токсичные и взрывоопасны.
К тому же, энергетичность такого топлива не самая высокая.
Ракетный керосин имеет высокую плотность, что позволяет делать баки меньшего размера и, даже переохлажденный, не достигает уровня крио, что упрощает конструкцию. Но энергетичность невысока.
В последнее время общая тенденция направлена на пару метан/кислород. Это компромисс между высокой энергичностью водорода и более высокой плотностью керосина. К тому же, метан можно производить из воды и углекислого газа, что открывает перспективу производства топлива на других планетах для заправки ракет, чтобы они могли лететь дальше или возвращаться на Землю.
К дополнительным бенефитам, как и водород, сжигание метана не дает осаждение сажи в двигателях, что повышает многоразовость использования двигателей и минимизацию техобслуживания.
Конструкция ЖРД.
Почти все ЖРД используют турбонасосные агрегаты (ТНА) для подачи топлива в камеру сгорания. Я написал “почти” потому, что появился двигатель ракеты Электрон, который называется Резерфорд, использующий для подачи компонентов топлива электронасосы.
Кроме ЖРД с ТНА, для двигателей малой тяги, используется вытеснительная схема (подача топлива за счет создания высокого давления непосредственно в баках). Но такое неприменимо в двигателях первой и второй (третьей) ступени.
Для работы ТНА требуется горячий газ для раскручивания турбины. По методу получения, подачи и сброса рабочего газа ТНА существуют 3 вида циклов: открытый цикл, закрытый цикл (с дожиганием генераторного газа), цикл с отбором генераторного газа из камеры сгорания.
«ЖРД c открытым циклом», «ЖРД без дожигания» – схема работы ЖРД.
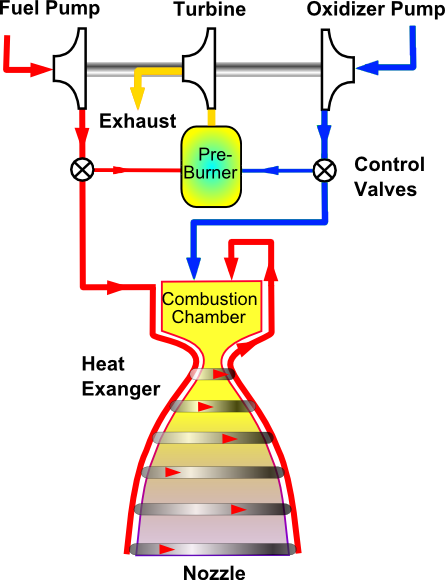
Часть топлива сжигается в газогенераторе (пребернер) и полученный горячий газ используется для приведения в действие топливных насосов, после чего сбрасывается в атмосферу. Это наиболее простой и дешевый вид конструкции, обеспечивающий и высокую тягу и меньший собственный сухой вес двигателя, то есть более высокую тяговооруженность. Как пример – рекордняй по тяговооруженности ЖРД Мерлин-1Д+ с тяговооруженностью 190:1.
ЖРД замкнутой схемы, выполненный по схеме с дожиганием генераторного газа.

В ЖРД замкнутой схемы каждый (либо один) из компонентов газифицируется в газогенераторе за счёт сжигания при относительно невысокой температуре с небольшой частью другого компонента, и получаемый горячий газ используется в качестве рабочего тела ТНА. Сработавший на турбине генераторный газ затем подаётся в камеру сгорания двигателя, куда также подаётся оставшаяся часть неиспользованного компонента топлива. В камере сгорания завершается сжигание компонентов с повышением давления в камере сгорания, что увеличивает удельный импульс.
В зависимости от того, какой именно компонент газифицируется полностью, различают двигатели закрытой схемы с окислительным генераторным газом (примеры: РД-253, семейство РД-170, РД-120, НК-33, РД-0124), с восстановительным генераторным газом (примеры: РД-0120, SSME, РД-857, LE-7/LE-7A) и с полной газификацией компонентов (РД-270, Раптор)
К недостаткам ЖРД закрытого цикла относится то, что повышение давления в камере сгорания вызывает повышенные требования по прочности всех компонентов и агрегатов, трубопроводов, клапанов и т.д. Это приводит к удорожанию двигателя, повышению собственного веса и, как следствие, снижение тяговооруженности.
Как сравнительный пример, двигатели семейства РД-170 (РД-180, РД-191), имея высокий УИ, имеют сравнительно низкую тяговооруженность на уровне 86:1, против ЖРД открытого цикла Мерлин-1Д+ с показателем 190:1.
Combustion tap-off cycle – цикл с отбором части газа из камеры сгорания для раскрутки ТНА.

К преимуществам этого типа двигателей относится простота конструкции, не требующий preburner (газогенератора), меньший вес и меньшая себестоимость производства двигателя.
К недостаткам – снижение давления рабочего тела в камере сгорания, что уменьшает скорость потока, как следствие – уменьшение УИ.
Как пример, двигатель ВЕ-3 фирмы Блю Ориджин, используемый в ракете Нью Шепард. Вариант ВЕ-3U планируется использовать на второй ступени ракеты Нью Гленн.
Типы ЖРД по камерам сгорания
В середине 30-х годов, столкнувшись с проблемой возникновения циклической нестабильностью горения при увеличении камеры сгорания, Роберт Годдард предложил вместо одной большой камеры, несколько камер меньшего размера, в которых нестабильность не возникает, объединенных общим каркасом и общим турбонасосом.
Многокамерные двигатели – это признак неспособности преодолеть проблему нестабильности горения.

Многокамерные двигатели имеют множество недостатков.
Прежде всего, это то, что нельзя в один корпус ракеты поставить несколько таких двигателей. Один корпус – один двигатель.
Если нужно несколько двигателей, то приходится составлять несколько корпусов вместе, в пакетную схему.

Часто спрашивают, мол, какая разница – ставить несколько двигателей или один с несколькими камерами.
Разница колоссальная.
Прежде всего это управляемость.
В много-двигательной схеме можно управлять тягой каждого двигателя индивидуально, можно отключать часть двигателей.
Многокамерный двигатель не позволяет ни отключить часть камер, ни изменять тягу камер по отдельности.
Это вызывает, как следствие, невозможность создания запаса по надежности, engine-out-capability. Чтобы объяснить наглядно, Falcon 9 и Saturn V, в случае отказа части двигателей ступени, могли и могут продолжить полет и выполнить поставленную задачу. Если двигатель на ступени только один, то его отказ вызывает неминуемую катастрофу.
Так, в одном из запусков Saturn V произошел отказ 2 из 5 двигателей J-2 второй ступени. Тем не менее, полет продолжился и Аполлон был выведен на орбиту. При запуске CRS-1 преждевременно отключился 1 из 9 двигателей Мерлин. Тем не менее, корабль был выведен на орбиту и долетел до МКС.
Любая подобная аномалия с многокамерным двигателем приводит к аварии.
Многокамерный двигатель практически невозможно использовать для пропульсивной посадки ступени.
Степень дросселирования ограничена примерно 27-30% максимальной тяги. При дальнейшем дросселировании, двигатель просто погаснет.
В многодвигательной схеме, можно использовать один или часть двигателей, каждый из которых может дросселироваться индивидуально. Так 9 двигателей Мерлин ракеты Falcon 9 создают при взлете тягу 86*9=774 тс. А при посадке ступени с посадочным весом около 20 тонн работает 1 двигатель, дросселированный до примерно 30%, создавая тягу около 25-26 тс, что позволяет сажать ступень аккуратно и мягко.
Если транслировать этот расчет на первую ступень ракеты Атлас-5 с двухкамерным двигателем РД-180, то при посадочном весе около 15 тонн, минимальная тяга единственного двигателя составит, при 40% дросселировании, 156 тс. Либо ступень расплющит, либо бросит вверх. Посадить не получится.
Отрадно видеть, что в России стали постепенно отходить от многокамерной схемы, но надо ещё и переходить к многодвигательной. А этого пока не видно.
Оценка современных ЖРД
Керосиновые двигатели
Сейчас лучшим двигателем первой ступени является Мерлин-1Д+ многоразовой ступени ракеты Falcon 9. Если посмотреть выше, на требования к ЖРД первой ступени, то важнейшим показателем является его тяговооруженность. У Мерлина она рекордная, порядка 190:1. Вместе с легкой конструкцией самой ракеты, это создает показатель весового совершенства 4,15%. Falcon Heavy имеет ещё больший показатель – 4,49%. В конечном счете, это самый яркий показатель эффективности всей ракеты.
Для сравнения, Атлас-5 с двигателем РД-180 имеет сей показатель 2,93%
Метановые двигатели
Как я уже писал выше, переход от керосиновых и водородных двигателей к метановым сейчас стал доминирующим трендом.
Из реально работающих, стоит отметить только двигатель Раптор компании SpaceX.

По конструкции, это однокамерный ЖРД закрытого цикла с полной газификацией компонентов (см.выше).
По техническим характеристикам, на настоящий момент, он развивает тягу на уровне моря до 225 тс и УИ порядка 340 с на уровне моря. Сейчас они достигли тяговооруженности 150:1, но добиваются улучшения этой характеристики – планируется достигнуть тяговооруженности > 170:1. Это меньше, чем у Мерлина, но всё же огромная величина, особенно для ЖРД закрытого цикла.
С финансовой стороны, Маск заявил цель достигнуть себестоимости при серийном производстве $1000/1 тс. То есть Раптор должен стоить около $250 тысяч за единицу. Сравние с ценами на РД-180 или RS-25 цена которых улетела за пару десятков миллионов.
Даже, если Маск, как обычно, слишком оптимистичен в своих ожиданиях, очевиден существенный прогресс в себестоимости.
Плюс к этому, двигатели многоразовые и не требуют серьёзного межполетного обслуживания. Планируется довести многоразовость до 1000 циклов включения/выключения без капремонта.
Другим метановым ЖРД почти достигшим операционной стадии является двигатель Блю Ориджин ВЕ-4, который преднаначается для установки на первые ступени ракет Вулкан (ULA) и Нью Гленн (собственно компании Блю Ориджин)

По этому двигателю информации не очень много. Известно, что его проектная тяга на уровне моря такая же, как у Раптора, 250 тс, но давление в камере сгорания значительно ниже (13,5 против 33 mPa), а это значит, что удельный импульс значительно ниже.
Блю Ориджин объясняют это тем, что они добиваются большей надежности и многоразовости двигателя за счет меньших нагрузок.
Также, как Раптор, конструктивно, это ЖРД закрытого цикла (но без полной газификации компонентов).
Для меня выглядит странным, даже каким-то диким, что, с одной стороны, они пошли на закрытый цикл (главное преимущество – увеличение давления в камере сгорания и повышение УИ), а с другой стороны умышленно снижают давление и УИ для уменьшения нагрузок и увеличения многоразовости.
К тому же, Блю Ориджин продолжает испытывать технические трудности в камере сгорания этого ЖРД, хотя и обещают всё решить в самое ближайшее время.
Тут кто-то написал, что ВЕ-4, по сути, создавался на базе двигателя шаттла RS-25, только переделанного под метан. Это совершенно не так.
ВЕ-4 создавался на базе ВЕ-3, но с большими изменениями.
Прежде всего, ВЕ-3 значительно меньше, чем ВЕ-4, ВЕ-3 – водородный, а ВЕ-4 – метановый. И главное, ВЕ-4 – ЖРД закрытого цикла, а ВЕ-3 – с отбором газа для ТНА из камеры сгорания (tapp-off cycle).
Вообще, техническая политика компании Джеффа Безоса остается для меня загадочной и вызывает всё больше сомнений. Если они хотели сделать метановый двигатель с пониженными нагрузками, в расчете на более высокую надежность и многоразовость, то почему они ушли от tapp-off cycle, который хорошо обкатали на ВЕ-3? Движок без газогенератора был бы легче, имел более высокую тяговооруженность, конструктивно проще и дешевле.
Не понимаю…
Российские перспективные ЖРД
Об этом судить сложно, поскольку почти все они исключительно в обещаниях и хотелках.
Из реального – очередная форсированная модификация РД-170, которая не дает шансов на многоразовость с пропульсивной посадкой. Создается впечатление, что это достижения ради достижений, не имеющие практического смысла.
В последние недели заговорили про многоразовые ступени Союз-СПГ с метановыми двигателями. Таким двигателем называют РД-0164 или РД-0177 – не очень понятно. Кроме того, что он сейчас в стадии эскизного проектирования, известно, что его тяга на уровне моря будет примерно, как у Мерлина, где-то около 85 тс. Про конструкции я ничего не знаю – даже эскизный проект ещё не завершен, а 85 тс – это по техзаданию.
У меня нет уверенности, что эти двигатели когда-нибудь доведут до эксплуатации и на каких ракетах.