Увага: читати багато, але є малюнки та відео.
Вибачте за попсовість, але не міг утриматись від спокуси виставити це фото на обкладинці. Тепер суто до теми.
Canadarm, що застосовувалась на Space Shuttle була першим у своєму роді роботизованим маніпулятором. Успішна експлуатація цієї системи призвела до створення нового, більшого за розмірами та досконалішого Canadarm2, що став важливою частиною Міжнародної Космічної Станції.

Хоча Canadarm міг гнучко рухатися, він залишався незмінно закріпленим на одному кінці всередені вантажного відсіку човника. Нова ж версія руки, встановлена на МКС тепер була здатна не тільки гнучко рухатись, але ще й пересуватись вздовж станції кінець за кінцем, подібно до руху хробака, щоб мати можливість досягти багатьох частин станції.
Зауважу, що так само, як під назвою Starship ми розуміємо як другу ступінь, що має досягти орбіти, так і всю багаторазову ракету разом із бустером, так само назва Canadarm2 застосовується як безпосередньо до маніпулятора, який за основною конструкцією дещо схожий на Canadarm, так і до всього роботизованого комплексу. Офіційно застосовується назва Mobile Servicing System (МSS), – Система мобільного обслуговування і складається вона з кількох окремих компонентів:
- Canadarm2, або Space Station Remote Manipulator System (SSRMS) – дистанційного маніпулятора, який доставлено на МКС у 2001 році;
- Mobile Base System (MBS) – робочої платформи, яка рухається по рейках уздовж космічної станції – доставлена на МКС у 2002 році;
- Special Purpose Dexterous Manipulator (SPDM), або Dextre – маніпулятор спеціального призначення, який з’явився на МКС у 2008 році;
- Пульту дистанційного керування системою, розташованого в купольному модулі МКС.

Конструкція Canadarm2
Проектування, виготовлення та тестування Canadarm2 відбувалось з 1986 по 2001 рік і було здійснено компанією MDA, розташованої у Брамптоні, Онтаріо.
Рука другого покоління була розроблена таким чином, щоб збільшити розміри операційного простору, вдосконалити довговічність, покращити здатність обробляти більші за розмірами корисні навантаження. Інноваційним рішенням було надати маніпулятору мобільність пересування завдяки симетричному дизайну та ідентичності обох кінцівок руки. Суттєвим фактором також була вимога реконструкції, технічного обслуговування та можливість замінювати частини маніпулятора беспосередньо в космосі.

Довжина повністю витягнутого Canadarm2 становить 17,6 м, він має сім моторизованих суглобів: “лікоть” посередині та три поворотні з’єднання на кожному з кінцівок “зап’ястя/плеча”. Рука має масу 1800 кг, діаметр 35.6 см, складається з двох довгих стріл і може працювати з вагою до 116 000 кг. Конструкція виготовлена з 19 шарів високоміцного, термостійкого вуглецевого волокна PEEK/IM7 (PolyEtherEtherKetone/Carbon fiber). Роботизована рука має датчики руху i сили, які забезпечують відчуття дотику, щоб астронавти могли визначати силу, з якою рука контактує з різними об’єктами. Вони дозволяють оператору більш ефективно захоплювати об’єкти, надсилати більше інформації. Система також здібна самостійно виправляти помилки, які робить оператор. Є чотири камери, розташовані по обидва боки ліктя та на кінцевих елементах-затисках. Цим величезним краном можна керувати або в автоматичному режимі, або вручну.

Мабуть найважливішими елементами маніпулятора є два Latching End Effector’s (LEE) – замикаючі кінцеві затискачі на кожному кінці плеча руки. Вони забезпечують захоплення, подачу живлення маніпулятора та каналами обміну даними від Canadarm2 та Dextre. Працюють затиски разом з Power data grapple fixtures (PDGF) – пристроями кріплення, які розташовані на зовнішній стороні МКС або космічного апарату. PDGF – водночас виконує роль гачка та електриної розетки і стратегічно розміщені, щоб забезпечити доступ до багатьох частин зовнішньої поверхні станції. Невеличке відео демонструє принцип дії цього механізму:
На МКС є п’ять фіксуючих кінцевих затискачів LEE. Два, – по одному на кожному кінці самої Canadarm2. Один міститься на пересувній платформі (Mobile Base System), один на Dextre та один запасний. Ще один запасний знаходиться на Землі. Оскільки ці “ручки” Canadarm2 беспосередньо механічно контактують і використовуються досить часто, вони мають більший знос, ніж решта компонентів системи. Тож, коли в серпні 2017 року один із затискачів почав демонструвати деякі проблеми, це не стало повною несподіванкою. Протягом наступних місяців під час кількох “космічних прогулянок” (саме так слово в слово звучить англійською те, що ми жахливо кличем “виходом у порожнечу”) астронавти замінили несправний елемент. Його було відправлено на вантажному Драконі ремонтувати на Землю. Детальніше ця подія висвітлюється тут. Роботизована рука була розроблена з можливостю відновлення на орбіті. І протягом експлуатації її елементи неодноразово були успішно замінено.

Розгортання Canadarm2 на МКС
Перед тим як залишити Землю і вирушити в космос 19 квітня 2001 року разом з експедицією STS-100, Canadarm2 був надійно закріплений до спеціального металевого каркасу, призначеного для збереження руки цілою під час транспортування. Він був завантажений у відділення корисного навантаження космічного човника NASA “Endeavour”.
Тим часом також були зроблені інші підготовчі заходи для забезпечення успішного розгортання системи. Астронавт Канадського космічного агентства Кріс Гедфілд (Chris Austin Hadfield) був одним із двох членів екіпажу, призначеним розпакувати та налагодити Canadarm2 зовні станції. Щоб забезпечити бездоганну установку та підготуватися до технічної діяльності, Гедфілд та астронавт NASA Скотт Паразинський (Scott Edward Parazynski) брали участь у інтенсивному навчанні. Обидва виконували завдання під водою в лабораторії нейтральної плавучості NASA в басейні глибиною 12 метрів, призначеному для імітації невагомості космосу.
Встановлення Canadarm2 на космічній станції вимагало складної хореографії. Як тільки “Endeavour” опинився в зоні дії МКС, Canadarm підняв металевий піддон, що містив Canadarm2, з вантажного відділення човника, щоб прикріпити його до лабораторії МКС «Destiny». Перебуваючи в космічному просторі, Гедфілд і Паразинський приєднали тимчасовий кабель електричного живлення, даних та відео між Canadarm2 та станцією, відкріпили руку від піддону, вручну розгорнули дві довгі стріли і закріпили їх посередині, що дозволило привести маніпулятор в робочий стан. Зсередини станції астронавти NASA Сьюзен Хелмс (Susan Jane Helms) і Джим Восс (James Shelton Voss) дистанційно наказали Canadarm2 простягнути руку одному з двох затискачів (LEE) до пристрою кріплення на модулі Destiny. Canadarm2 приєднався, рука звільнилася від піддону, виконуючи її перший маневр у космосі.
Гедфілд також пройшов на Землі курс оператора звичайного Canadarm і серед інших обов’язків, відповідав за використання Canadarm, встановленого на шаттлі для переміщення конструкції кріплення назад у човник для повернення її на Землю.
{kind=link}
{kind=link}
Після встановлення були перевірені основні функції Canadarm2. Рука змогла виконувати свою діяльність та допомагати збирати космічну станцію. Роботизований маніпулятор зібрав більшість компонентів та модулів МКС. Він також перемістив за своє життя тони різноманітних матеріалів і часто підтримує багатьох астронавтів під час ризикованих “космічних прогулянок”. Окрім підйому важких вантажів та рухомих частин МКС під час будівництва, Canadarm2 допомагає зі стикуванням космічних кораблів, які прибувають на космічну станцію.
Мобільна базова система
Mobile Base System (MBS) – це робоча платформа, яка рухається на візку (mobile transporter) вздовж рейок ферми, що простягається у майже всю довжину космічної станції. Система забезпечує рухливу робочу платформу для використання Canadarm2 і Dextre. Проходить через основні ферми і може отримати доступ до будь-якого з восьми робочих місць, які мають підключення до електромережі для Бази або для будь-якого обладнання, що на ній закріплено.

На борту є чотири пристрою лише механічного кріплення (grapple fixtures), до яких можуть кріпитись Canadarm2 та Dextre. Коли Мобільний транспортер та Мобільна база мають рухатися разом уздовж ферми, База та її обладнання, закріплене на платформі вимикаються. Коли ж платформа фіксується на новому майданчику, вони вмикаються і робота може розпочатися.

У MBS є чотири пристосування для електричного кріплення і обміну даними (power data grapple fixtures), – так звані опорні точки, які дозволяють Canadarm2 та Dextre підключатися до бази. Ці пристрої дозволяють роботам отримувати живлення, дані та відеоз’єднання з МКС. Мобільний транспортер, на якому встановлено MBS, експлуатується наземною командою в штаб-квартирі Канадського космічного агентства та NASA.
Мобільну базу побудували компанії MacDonald, Dettwiler and Associates, що базується в місті Бремптон, Онтаріо. Її було запущено на борту космічного човника “Endeavour” у червні 2002 року. Кілька хвилин відео презентації, що відбулась після повернення місії STS-111 чудово демонструють складну працю астронавтів (eng.)
Маніпулятор спеціального призначення
Компонент, відомий як “Dextre” (не плутати з серіалом Dexter), або “роботизований космонавт”, або “майстер на всі руки” має аж дві власні руки і потребує окремого обговорення.
Пульт дистанційного керування
Замість нудного переліку обладнання, яке забезпечує контроль Canadarm2, пропоную просто залучитись до екскурсії, яку проводить сам Кріс Гедфілд. Подія відбувалась 2013-03-03, коли екіпаж eкспедиції STS-34 готувався до зустрічі вантажного SpaceX’s Dragon, щоб захопити і закріпити його за допомогою Canadarm2. Для тих, кому важко сприймати на слух англійську, під спойлером є переклад.
Якщо ви зібрались керувати роботом, приємно спостерігати за тим, що ви робите. Космічна станція має спеціальне місце з вікнами, яке називається куполом, і саме туди ми прямуємо до пульту Canadarm2, щоб схопити Дракона.
Тут всередині купола є всі елементи управління, необхідні для того, щоб працювати і бачити, що ви робите з Canadarm2. Дозвольте мені показати вам, що у нас є. Тут, в центрі, у нас є основний комп’ютерний інтерфейс, який показує всі дисплеї, необхідні для роботи з ним. Тут, праворуч, у нас є поворотний ручний контролер. Тут, зліва, у нас є ручний поступальний контролер для переміщення речей вгору і вниз. А потім у нас є три екрани, які показують різні види камер за межами космічної станції, щоб ви могли бачити, що саме ви робите. І останнє – педаль ручного управління, яка змінює спосіб керування камерами, спосіб налаштування руки в різних режимах, переконайтеся, що у вас все налаштовано за допомогою приємного, простого інтерфейсу, щоб ви могли впевнено керувати Canadarm2 і нехай він робить свою роботу.
Щоб керувати Canadarm2, потрібно стабілізувати своє тіло. І ось місце, де можна поставити ноги. Не надто складно. Засовую сюди пальці ніг, і тепер мої руки вільні, тіло зафіксовано, а я готовий працювати з Canadarm2.
Нам надзвичайно пощастило не тільки мати можливість жити і працювати в цьому місці, але й бути людьми, які керують маніпулятором. Канада побудувала Canadarm2, а Canadarm2 збудувала цю космічну станцію. Кожен повинен цим пишатися.
Технічні характеристики
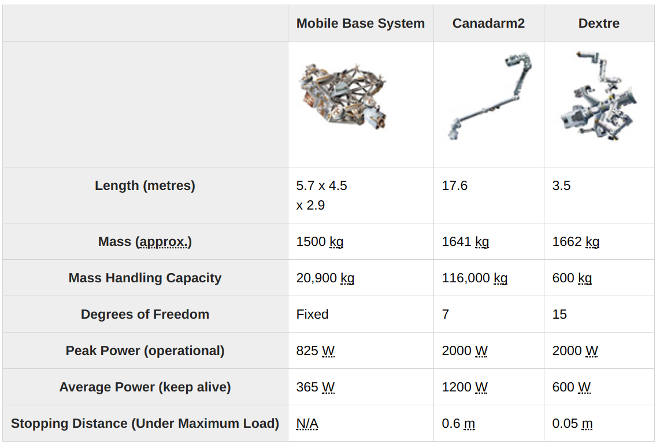
| Мобільна базова система | Canadarm2 | |
| Довжина, м | 5.7 x 4.5 x 2.9 | 17.6 |
| Маса, кг | 1500 | 1641 |
| Максимальна утримувальна маса, кг | 20900 | 116000 |
| Ступені свободи | 1 | 7 |
| Пікова робоча потужність, Вт | 825 | 2000 |
| Середня потужність для підтримки, Вт | 365 | 1200 |
| Шлях до зупинення при макс. навантаженні, м | – | 0.6 |
Критика Canadarm2
Позитивну інформацію про Систему Мобільного Обслуговування (Canadarm2) знайти дуже легко. І відверто кажучи, це дійсно чудова складова Міжнародної космічної станції. Але я намагвся також знайти можливі недоліки. Невже за більше, ніж 20 років експлуатації не виникло жодної критики? Не може такого бути. Але ось все, що мені вдалося знайти:
- робота Canadarm2 в значній мірі залежить від комп’ютерних технологій, і якщо одна річ виxoдить з ладу, вся рука може вимкнутись (на МКС тримають запасні деталі, але далеко не всі);
- для виконання операцій на всіх частинах станції у маніпулятора не вистачає часу, особливо під час перебування на МКС кількох місій;
- оператор все ще спроможний зробити помилки, які можуть поставити під загрозу місію, і тому необхідно покращувати софт та встановлювати додаткові сенсори і відеокамери;
Перший і останній “недоліки” вочевидь протирічять один одному, а істина знаходиться, ймовірно, десь посередені. Але що дійсно кидається в очі, головним недоліком Canadarm2, є відсутність ще одної Canadarm2. Дехто з вас може заперечити мені, адже з 2008 року МКС має Японський дистанційний маніпулятор. Це так, але він стаціонарно закріплений і обслуговує лише потреби японського модуля きぼう (Кібо).
І що цікаво, вартість всієї системи Canadarm2 оцінюється загалом лише близько 600 млн доларів (не настільки шалені гроші, особливо, якщо згадати бездонну яму для викидання грошей, що має назву SLS). Космічний простір для людини не є природним середовищем і будь-яка помилка може мати фатальні наслідки, що потягне за собою гальмування розвитку всієї космонавтики. І якщо для орбітальної станції, яка скоріше за все через кілька років вийде з експлуатації цей недолік виправляти немає сенсу, то в майбутніх проектах всі важливі системи (з моєї точки зору) обов’язково повинні буть продубльовані.
• https://www.thecanadianencyclopedia.ca/en/article/canadarm
• http://www.spaceref.com/iss/elements/mss.html
• https://cc-space.weebly.com/canadarm.html
• https://www.nasa.gov/audience/foreducators/k-4/features/F_Canadian_Crane.html
• https://www.nasa.gov/pdf/179225main_ISS_Poster_Back.pdf
• https://www.nasa.gov/mission_pages/station/structure/elements/mobile-base-system/
• https://asc-csa.gc.ca/eng/iss/mobile-base/default.asp • https://asc-csa.gc.ca/eng/robotic/default.asp
• https://en.wikipedia.org/wiki/STS-100
• https://en.wikipedia.org/wiki/Grapple_fixture
• https://en.wikipedia.org/wiki/Mobile_Servicing_System
• https://media2.spaceq.ca/wp-content/uploads/2017/10/23171133/csa_iss_mobile_base_system.jpg
{kind=link}