
Вступ
Canadarm – мабуть найвідоміше технологічне досягнення Канади в космічній галузі. Ця роботизована рука підтримувала місії американських шатлів протягом 30 років (1981–2011).
Із розвитком американської орбітальної космонавтики постала важлива необхідність створити інструмент, який бездоганно функціонує в космосі зі спритністю людської руки. І Canadarm був розроблений у відповідь на потребу, оголошену NASA на початку 1970-х років. У той час NASA розробляло нову космічну транспортну систему Space Shuttle. Рука маніпулятора повинна була мати можливість вивантажувати вміст відсіку корисного навантаження космічного човника.
У проекті брали участь ряд канадських фірм: DSMA Atcon, Spar, CAE Electronic and RCA.
Американське космічне агенство висунуло досить жорсткі вимоги до маніпулятору з багатьох позицій, а саме:
- вага
- спритність
- ручне та автоматичне керування
- універсальність
- точність
- безпека
- надійність
Щоб задовольнить усі ці умови було ретельно проаналізовано матеріали, які б витримували суворі умови космосу. Обрали титан, неіржавіючу сталь та епоксидну смолу.
Конструкція
Конструкція отримала назву Shuttle Remote Manipulator System (SRMS). Кожен компонент збірки SRMS (тобто плече, лікоть або зап’ястя) складався з базового елемента, який називався Joint-One-Degree-of-freedom або JOD, – суглоб з одним ступенем свободи. JOD – це редуктор з двигуном, угрупування яких дозволяє основній структурі руки згинатися і обертатися так само, як рука людини.
У “плічовому суглобі” було два JOD, які дозволяли всій руці нахилятись (рух вгору-вниз) і рискати (рух з боку в бік). Був ще один JOD у “лікті”, щоб зміщувати нижню частину маніпулятора. Ще три JOD у “зап’ясті” дозволили кінчику руки нахилятись, рискати та обертатись. Навіть більше, – SRMS міг рухатися набагато вільніше, ніж рука людини за необхідністю виконання дуже складних маневрів. Двигуни кожного JOD мали власні гальма та спільне регулювання швидкості. Кожен JOD також містив пристрій, який точно вимірював кути з’єднання.

JOD з’єднувались між собою верхньою та нижньою стрілами, виготовленими з вуглецевої епоксидної смоли. Перша стріла мала довжину близько 5 метрів і діаметр 33 сантиметри. Вона містила 16 шарів графіто-епоксидної смоли (кожен шар товщиною 0,013 сантиметра) і важила близько 23 кілограмів. Нижня стріла була довжиною близько 5,8 метрів і також 33 сантиметри в діаметрі, але мала 11 шарів графіто-епоксидної смоли і важила близько 22,7 кілограма. Кожна стріла була захищена бампером з кевлару (з того ж матеріалу, що використовується у бронежилетах) для запобігання вм’ятин або подряпин на вуглецевому композиті.
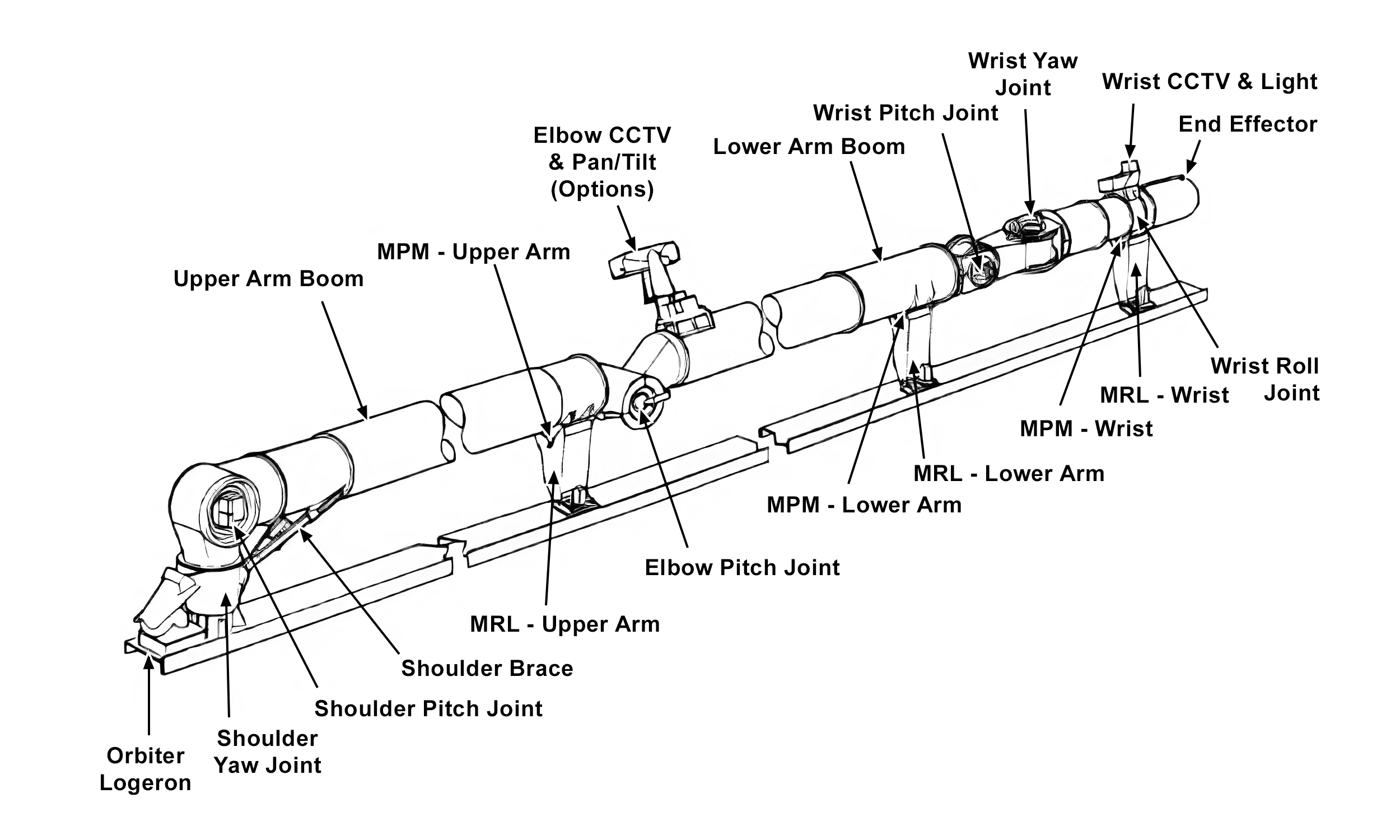
Джгут проводів забезпечував електроенергією всі з’єднання та кінцевий захвачувальний пристрій, а також посилання даних та інформації зворотного зв’язку від кожного із з’єднань. Цей зв’язок надходив від SRMS у відсіку для корисного навантаження до кабіни космічного шаттла, де астронавти мали можливість дистанційно керувати діями роботизованого маніпулятора.
Закінчувалась Canadarm циліндричним кінцевим затиском (еnd effector), який дозволяв руці захоплювати нерухомі або вільно літаючі корисні вантажі. Він забезпечував велику зону захоплення і механізм, здатний плавно стикуватись або утримувати корисне навантаження в нерухомому стані. Як приклад досить складного застосування маніпулятора було успішне розгортання сонячних батарей для Міжнародної космічної станції. Батареї у складеному стані містилися на 17-тонній фермовій конструкції у вантажному відділені шаттла. Астронавт, який керував Canadarm повинен був розгорнути компонент МКС з вантажного відсіку, розташувати маніпулятор робота так, щоб дротова петля всередині його кінцевого затиску затягувалася і тягнула пристосування, а прикріплена до нього велика фермова конструкція щільно прилягала до обода кінцевого затиску.
Роботизований пристрій також був оснащений системою телекамер і освітлення на руці та у вантажному відділенні, які передавали зображення на телевізійні монітори всередині орбітального апарату.
Комп’ютер загального призначення (GPC) космічного шатла контролював рух SRMS. Контролери ручного керування передавали комп’ютеру, що хотіли б робити рукою астронавти. Вбудоване програмне забезпечення вивчало команди астронавтів і розраховувало, які суглоби (JODs) рухати, у якому напрямку рухати, з якою швидкістю їх рухати та під яким кутом рухатися. Поки комп’ютер видавав команди кожному з суглобів, він контролював кожен суглоб кожні 80 мілісекунд. Будь-які зміни, внесені астронавтами у початкову траєкторію, повторно перевірялись та перераховувались GPC, а потім оновлені команди надсилались до кожного з суглобів. Система управління SRMS постійно контролювала себе кожні 80 мілісекунд. У разі несправності GPC автоматично застосовував гальма до всіх суглобів і повідомляв астронавта про стан несправності. Система управління також забезпечувала безперервне відображення дистанцій, кутів і швидкостей, які відображалися на моніторах, розташованих на палубі шатла. Як і в будь-якій системі управління, GPC можна було відмінити, і астронавт міг керувати маніпулятором безпосередньо.
Щільно прилягаюче ізоляційне біле покриття працювало разом з термостатичними нагрівачами, щоб утримувати Canadarm при сприйнятних температурах у вакуумі, захищаючи його компоненти від сильної спеки сонячних променів або від сильного холоду, коли рука перебувала в тіні.
Експлуатація
Оскільки система розроблялась, щоб працювати в умовах мікрогравітації, масивну роботизовану руку не можна було експлуатувати на землі. З метою тестування було збудувано випробувальну кімнату, щоб Canadarm можна було б випробовувати в дії. На доданок, було розроблено і комп’ютерну систему імітаційного моделювання для оцінки керованості та тренування астронавтів.
Уряд Канади надав NASA роботизовану систему Canadarm як свій внесок у проект Space Shuttle. Завдяки цьому внеску Канаді вдалося відправити в космос свого першого космонавта Марка Гарно (Joseph Jean-Pierre Marc Garneau), який нині очолює Міністерство закордонних справ Канади.
Вперше Canadarm був розгорнутий у космосі 13 листопада 1981 року. Екіпаж місії STS-2 розгорнув гігантську роботизовану руку з вантажного відділення космічного шатла “Колумбія”, і, на велике полегшення, вона спрацювала належним чином.
A після введення в експлуатацію першої системи NASA придбало ще чотири. Індустріальною командою, відповідальною за ці проекти, пізніше стали компанії MacDonald, Dettwiler and Associates Ltd.
За 30 років служби система роботизованого маніпулятора виконала багато завдань. Наприклад, вони використовувалися для відправлення супутників на орбіту, захоплення супутників для ремонту (телескопа Хаббл тощо), складання Міжнародної Космічної Станції, підтримування астронавтів під час виходу в космос, зйомки досвіду перебування астронавтів у космосі, огляду систем теплового захисту шаттла та багатьох інших справ.
У липні 2011 року програму Space Shuttle було згорнуто: останній політ здійснив космічний човник «Atlantis». Canadarm завершила 30-річну успішну діяльність, та вийшла на пенсію після місії STS-135, яка відзначила 90-й політ роботизованої руки. За час експлуататціі маніпулятор брав участь у 50 місіях та здійснив 7000 обертів навколо Землі, відпрацювавши без єдиної відмови.
Технічні характеристики :
Перша система Canadarm була здатна розгортати у космосі корисний вантаж до 29000 кг. Але в середині 1990-х років систему було перероблено, щоб збільшити її потужність до 266000кг (так-так, більш ніж в 9 разів!) для підтримки розбудови Міжнародної Космічної Станції.
| Довжина | 15,2 м (50 футів) |
| Діаметр | 38 см (15 дюймів) |
| Вага на Землі | 410 кг (905 фунтів) |
| Швидкість руху без навантаження | 60 см в секунду |
| Швидкість руху з навантаженням | 6 см в секунду |
| Зап’ястковий суглоб | Три ступені руху (тангаж/рискання/поворот) |
| Ліктьовий суглоб | Один ступінь руху (тангаж) |
| Плечовий суглоб | Два ступені руху (тангаж/рискання) |
| Трансляційний ручний контролер | Рухи вправо, вгору, вниз вперед і назад |
| Ручний регулятор обертання | Керує тангажем, рисканням і поворотом руки |
І на останок – коротеньке відео, в якому CSA демонструє роботу маніпулятора.
P.S. Більшість матеріалу було взято зі старого, на сьогодняшній день переробленого ресурсу Canadian Space Agency. Сучасна сторінка менш інформативна, але добре ілюстрована.