На розвиток ідеї «Сторожового пса цивілізації» (умовна назва Watchdog) спробував створити уявну модель реалізації подібного інструмента. Одразу хочу наголосити, що це концептуальна модель, більшість з параметрів якої я навмисно намагався залишити в «алгебраїчному» поданні. Аби не відволікатися від принципів на передчасні окремості. Крім того, я свідомо не торкаюсь практичних питань можливих алгоритмів обробки даних, обмежившись лише формулюванням головного принципу виявлення малих небесних тіл.
Нагадаю проблематику
Навколоземний простір насичений малими небесними тілами, які можуть являти собою як загрозу, так і джерело цінних ресурсів. Виявлення таких тіл ведеться давно і планомірно. Однак, прийняті критерії такого виявлення виглядають явно недостатніми: об’єкти розмірами менше 140 метрів взагалі опиняються поза увагою. Це при тому, що брили діаметром понад 60…70 метрів можуть досягати поверхні Землі, а не згоряти в атмосфері. Причому наслідки колізії співставні з ядерним бомбардуванням потужністю в десятки, а то і сотні Мегатонн. З іншого боку, такі відносно невеликі об’єкти є найбільш зручними для видобутку з них ресурсів прямо в космосі.
Активізація виявлення метеороїдних об’єктів у навколоземному просторі стримується тим, що більшість наземних спостерігачів можуть ефективно працювати лише частину часу, споглядаючи при тому доволі обмежені сектори простору. Спеціалізованих космічних апаратів створюється вкрай мало і їхні можливості обмежені «фотографічною» технологією спостереження, за якою вся небесна сфера фотографується окремими невеличкими «клаптиками», що потребує постійного перенацілювання інструмента і розтягує в часі увесь процес.
Очевидно, що для надійного виявлення загроз (скарбів) нам треба бачити одразу все небо і мати можливість оперативно порівнювати побачене з попередніми спостереженнями. Ідею (або гіпотезу) про те, як це можна досягти за наявних технологічних можливостей, сформулюю так:
Не обов’язково багаторазово фотографувати фрагменти зоряного неба і потім вишукувати на фотографіях об’єкти, які «зрушили» на фоні віддалених «нерухомих зірок». Достатньо організувати безперервне сканування неба з оцифровкою відеопотоку і подальше його порівняння з числовим масивом такого ж відеопотоку під час наступного раунду сканування. При цьому, під час порівняння цих масивів одразу відсіювати повторювані сигнали. Те, що залишиться в підсумку — і буде свідченням якихось змін, що відбулися в певній ділянці небесної сфери.
Що далі робити у випадку виявлення змін на небі. астрономи добре знають.
Для мене виявилося справді цікавим сюрпризом усвідомлення того, що подібна технологія спостереження взагалі не вимагає звичайних телескопів з важкими, дорогущими сферичними чи параболічними дзеркалами-довгобудами. Адже, нам не потрібно отримувати якісні фотографії ділянок неба. Ми можемо порівнювати «спотворені та перекручені» відео-зображення неба, звертаючи увагу лише на виявлені відмінності між двома стрімами з різних часів. Байдуже які відмінності. Сам факт виявлення відмінності за певними координатами і буде результатом полювання.
Тож, в якості оптичного підсилювача-збирача світла цілком згодиться циліндричне дзеркало.
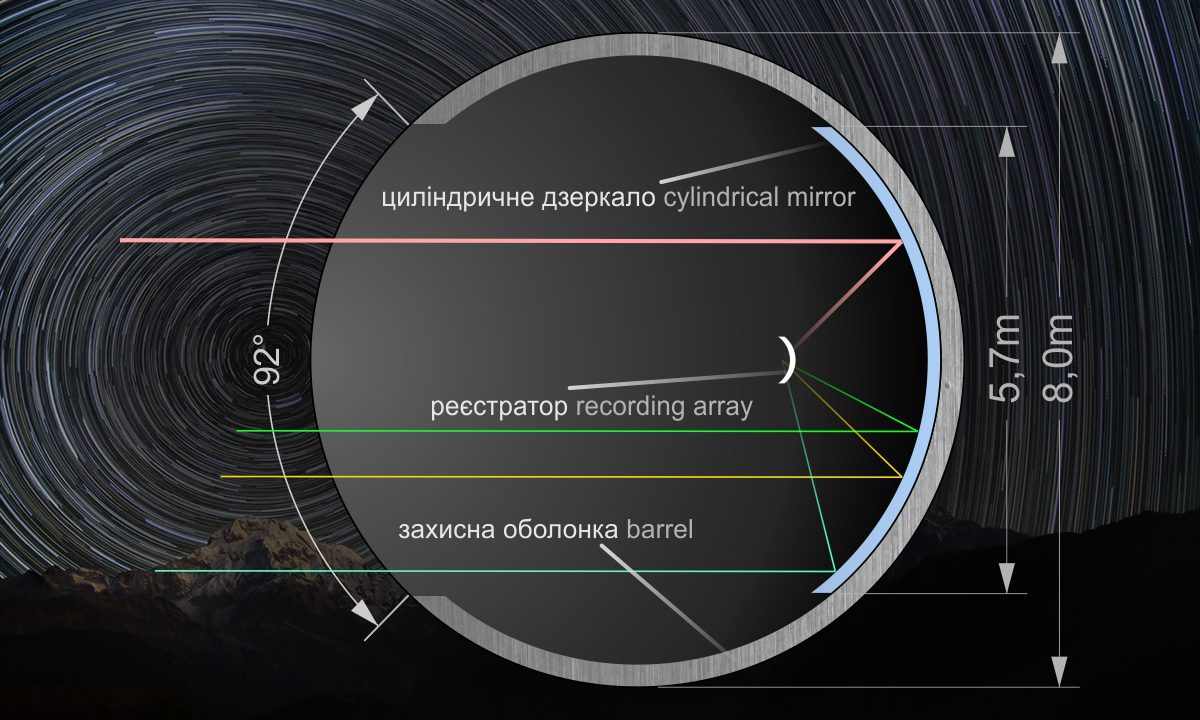
І це дзеркало може являти собою звичайний тонкий лист полірованого металу, «напнутий» на бокову поверхню такого собі барабану.
(Бийте мене, бийте. Я захисну амуніцію вже одягнув)
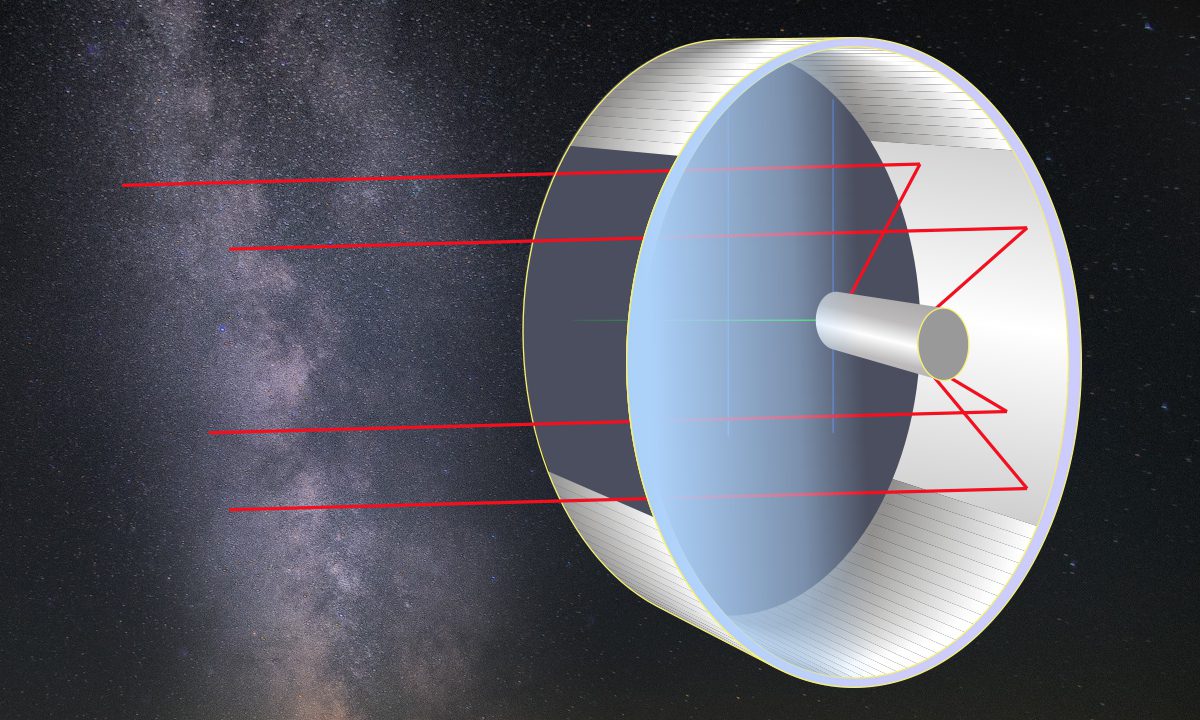
Через віконце в боковій поверхні барабана, навпроти дзеркала, в інструмент потраплятиме світло. Причому, всі інші поверхні барабана перешкоджатимуть потраплянню бокових засвітлень, а віконце гратиме роль своєрідної діафрагми, яка надійно обмежує світловий потік виключно з актуальної зони спостереження. Відбиваючись від дзеркала всі промені сфокусується на так званому лінійному фокусі (на відміну від точкового фокусу у сферичних дзеркал). Якщо біля цього лінійного фокусу помістити лінійний же сенсор, кожен окремий фотоелемент побачить свій піксель і надішле його бортовому комп’ютеру в складі безперервного відеопотоку. Комп’ютер «з лету» порівняє сигнал з аналогічним стрімом попереднього спостереження і проігнорує все, що лишилось незмінним. А Землю сповістить лише про виявлені відмінності між сигналами. Таким чином канал зв’язку із ЦУПом матиме реалістичні вимоги до пропускної здатності.
Примітка. Циліндричне дзеркало шириною 1 метр і розкриттям 5,7м (як на Малюнку 1) збиратиме приблизно стільки ж світла, скільки традиційне параболічне дзеркало телескопу діаметром близько 1,35 метри. Для порівняння, діаметр дзеркала славнозвісного Хаббла — 2,4 м. А спеціалізований, кометно-астероідний космічний телескоп WISE має усього 40-сантиметрове дзеркало
Як організувати суцільне спостереження за всією небесною сферою?
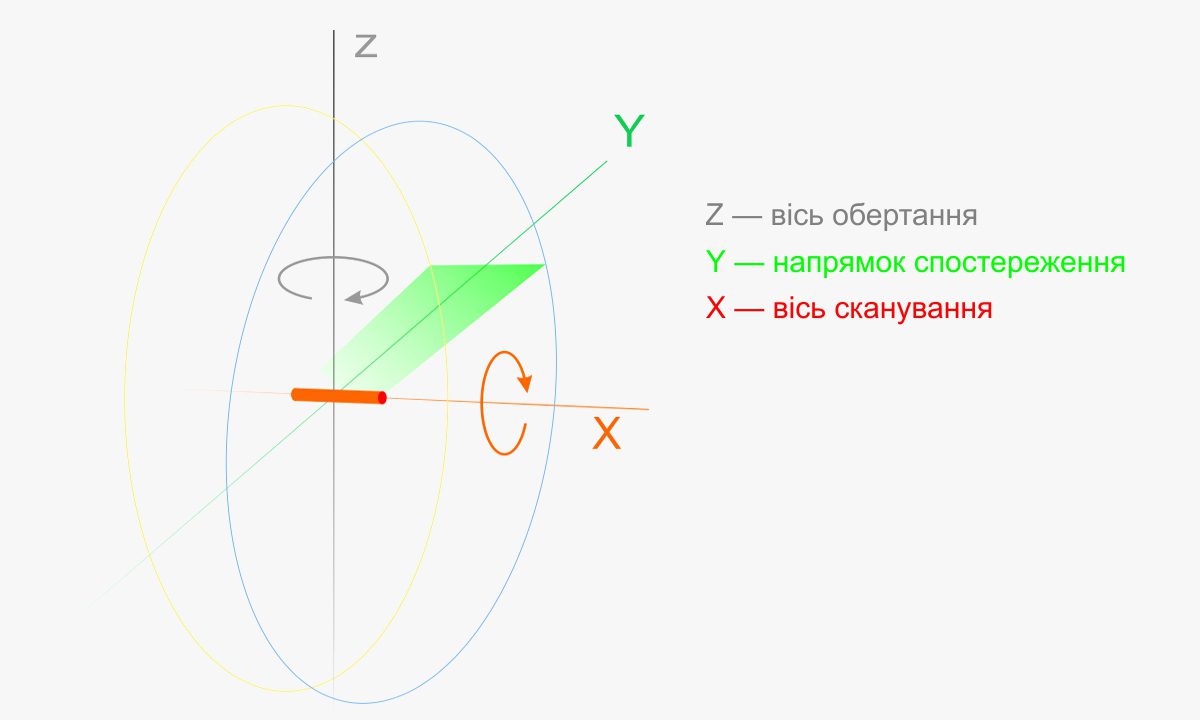
Очевидно, що нам доведеться обертати барабан Watchdog довкола своєї осі Х. І одночасно повертати саму вісь так, аби сенсор сформував спіральну відеодоріжку яка охоплює увесь Всесвіт (обертання довкола осі Z).
В цієї схеми спостереження є один суттєвий недолік. Обертання довкола одразу двох перпендикулярних між собою осей. Гіроскопічні ефекти вимагатимуть постійної роботи обертових гіродинів. А це означатиме відчутне енергоспоживання і швидке зменшення їх «моторесурсу». Добре було б якось обійтись лише однією віссю обертання, тоді інструменту не доведеться витрачати енергію на обертання, а гіродини вмикатимуться лише інколи, на короткий час. Виключно для корекції параметрів інерційного обертання, якщо і коли така корекція знадобиться.
Досягти цієї мети можна змусивши Watchdog бачити одразу не один сегмент неба, а всю кільцеву смугу, на всі 360 градусів одночасно. Для цього нам знадобляться кілька подібних барабанів, об’єднаних в подібну конструкцію:
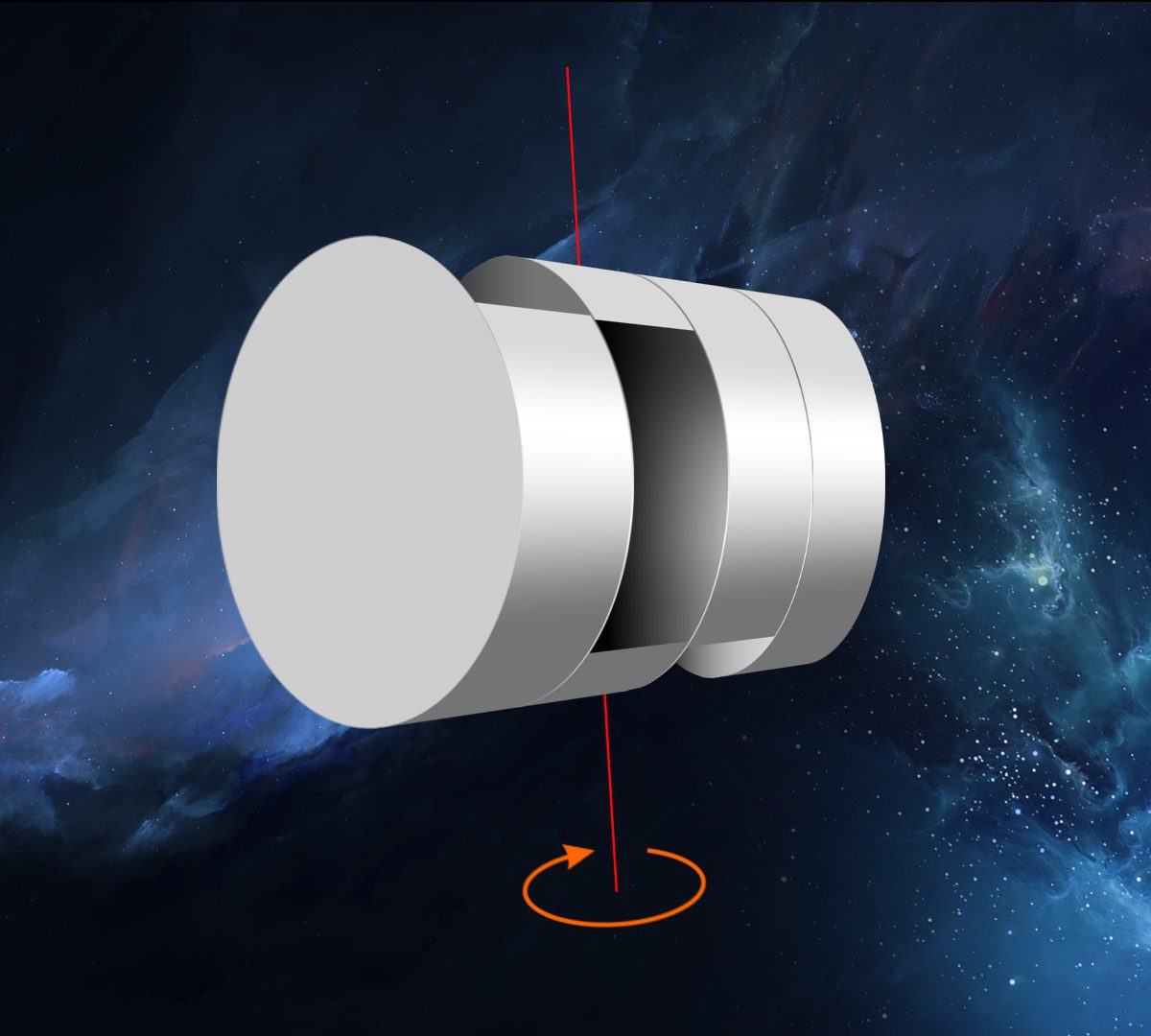
Як ви можете помітити, головною особливістю взаємного розташування барабанів є спрямування «віконець» таким чином, аби кожен барабан бачив свої 92 градуси, а вся четвірка одночасно — 360 градусів, з невеличким перекриттям «секторів обстрілу» між сусідами. Тепер, якщо ми почнемо обертати весь комплекс, як це показано на Малюнку 3, ми отримаємо бажане — 4 відеопотока, що разом охоплюють все небо.
З якою швидкістю обертати, залежить від чутливості сенсорів і постановки задачі на спостереження.
Наприклад, якщо ширина дзеркала, що на Малюнку 1, дорівнюватиме 1 метру, кут поля зору становитиме 8 градусів. В разі, якщо ми хочемо якнайшвидше дізнаватися про зміни в довколишньому просторі, ми можемо закрутити Watchdog з досить високою швидкістю — 1 оборот за годину. За такої швидкості обертання кожен об’єкт в полі зору сенсора засвічуватиме його приблизно 80 секунд. Десь так, в межах кількох десятків секунд експозиції, зараз робиться більшість знімків в програмах пошуку астероїдів. Для прикладу, найближчий аналог Watchdog, телескоп WISE фотографував небо з витримкою в 11 секунд. При цьому розрізняються об’єкти тьмяніші за 20 зоряну величину.
Та для вирішення головної задачі, Watchdog може обертатись значно повільніше. Наприклад, один оберт за добу. Тоді еквівалентна експозиція об’єктів в полі зору сенсора буде більшою за пів години. Як на мене, доволі солідний показник. Якої мінімальної яскравості об’єкти дозволить виявити така експозиція я не знаю. Але переконаний, що доступними стануть дуже дрібні камінчики, можливо навіть метрового класу. Якщо вони не дуже тьмяні і не дуже далеко, не за Марсом.
Орієнтація, комп’ютери, зв’язок і енергоживлення
Я вважаю, що найбільш логічним місцем розташування подібного інструменту є точки Лагранжа L4або L5 системи Земля-Місяць. Причому, він має обертатись в площині екліптики. По-перше, більшість космічного «сміття» знаходиться саме поблизу екліптики, по-друге це дозволить вкрити бокові поверхні барабанів сонячними батареями. Звісно, вони будуть засвічені не всією площею у безперервному режимі, в кожен момент часу Сонце засвічуватиме лише частину панелей, якими можна вкрити торцеві і бокові поверхні барабанів. Але і рівень енергоспоживання не має бути надзвичайним — лише комп’ютери, зв’язок, система термостабілізації і зрідка — гіродини.
Для первинної обробки даних знадобляться потужні бортові комп’ютери і чималий запас SSD-дисків. Скільки і яких — не знаю. Потужні і багато. Постає питання радіаційного захисту цих тендітних виробів. І тут, на наше щастя, на допомогу може прийти Starship — зайвих пару тон свинцю не являтимуть собою непідйомний вантаж. Та й водички можна залити. Заодно буде холодоагентом в системах термостабілізації електроніки.
Якщо вдасться організувати обробку даних прямо на місці, бортовими комп’ютерами, зв’язок із Землею може виглядати взагалі як надсилання в ЦУП інструкцій типу «Агов, Х’юстон! У вас проблеми! Скажіть там хлопцям, аби навелись на щось незрозуміле в Дельта-квадранті. На два пальця вище Веги і трохи ліворуч».
Хоча, добрий лазерний зв’язок ніколи не завадить.
Оцінка логістичної придатності.
Конструкція на перший погляд здається величенькою. Та можливо ви вже здогадалися, чому я проставив на малюнку діаметр барабану — 8 метрів. Габарити, що ви бачите на малюнках, це моя спроба сходу «вписати» увесь комплекс в карго-бей Starship. Якщо зупинитись на метрової ширини дзеркалах, вся «посилка» займе 25…30% дозволеного, для корисного вантажу, об’єму. Тепер щодо маси. Якщо барабани робити з улюбленої Маском 2мм-неіржавійки, для одного може знадобитися приблизно 120 м2 листового металу, і він важитиме менше двох тонн. «Тортик» з 4-х барабанів відповідно, не більше 8 тонн. Припустимо неймовірне, і приймемо, що кожне дзеркало важитиме тонну. Вже набігає 12 тонн. Плюс стількі ж — електронне начиння, допоміжні системи і сонячні батареї з акумуляторами. Маємо приблизну (песимістичну) вагу всього комплексу близько 24 тонн. Для оптимістичної оцінки можна згадати, що барабани необов’язково робити броньованими. Їхнє завдання — блокувати зайві світлові перешкоди. Тож і конструкція може бути легкою, каркасною. Обтягнутою ледь не фольгою. Очевидно, що подібний вантаж в 4 рази (як мінімум) менший за заявлену вантажопідйомність Starship.
Тут є цікавий момент. Оскільки доправляти Watchdog-barrel доведеться в Місячний «боковий» Лагранж, це майже те саме, що злітати до Місяця. Тільки сідати і потім злітати не доведеться.
Так що я обома руками за розробку «Місячного Лайнера». Нехай Маск його створює на гроші NASA. Він точно згодиться. Навіть, якщо жодного разу на Місяць не сідатиме.
На завершення хочу подякувати пану Viktor Yermolenko за безцінну допомогу в підготовці цього матеріалу. Його запитання і зауваження до попередньої статті в приватному листуванні дозволили мені навести відносний лад в макітрі і сформулювати ідею цифрового диференційного телескопа з циліндричним дзеркалом «Watchdog» в тому вигляді, якою ви зараз її бачите.
Щодо копірайтів і принципів розподілення нобелівського пирога: беріть і втілюйте ідею. Я ні на що не претендую. Хіба що на добру згадку. І ще 1 відсоток від кушу. Але після його здобуття і сплати всіх належних податків та зборів.