Развитие технологий имеет решающее значение в освоении других тел Солнечной системы. И в последнее время интерес к нашему ближайшему соседу – Луне – возрастает всё сильнее. У космических агентств и компаний сформировалась потребность в доставке грузов на поверхность нашего спутника.
Отсюда возникла программа по доставке коммерческих грузов на Луну – CLPS. NASA уже заключило контракты с двумя компаниями и рассчитывает на дополнительное сотрудничество для поддержки будущих лунных миссий.
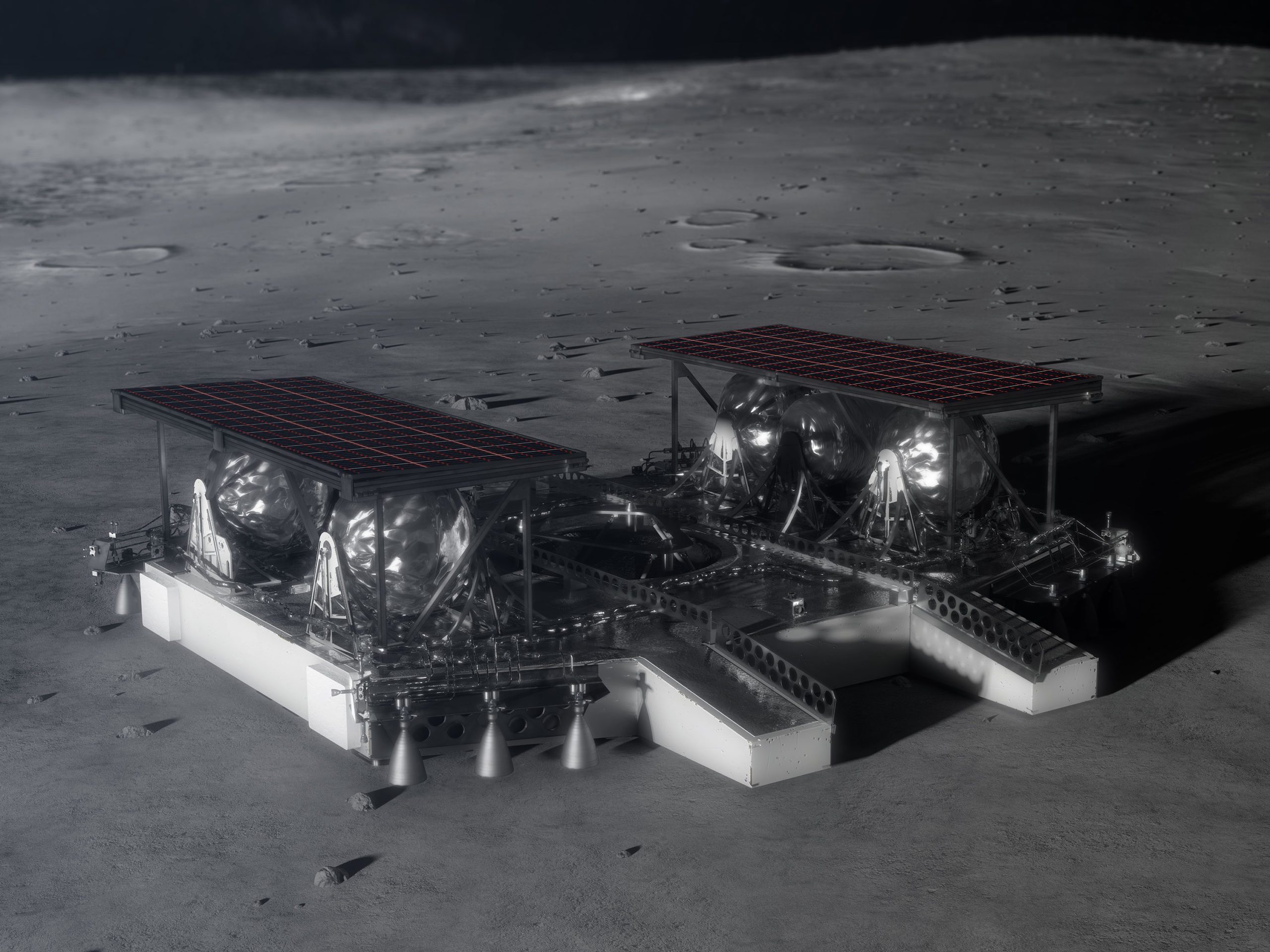
Чтобы подготовиться к этим миссиям, NASA провело ряд исследований с целью изучения технологий, необходимых для сбора ценных данных о Луне. Эти исследования привели к некоторым открытиям в двигательной инженерии, системах навигации и связи, системах посадки и других критически важных для посадочных аппаратов подсистемах. Недавно агентство опубликовало концепцию посадочного аппарата среднего размера, который смог бы доставить ровер в полярные районы Луны.
Об аппарате
Этот посадочный модуль спроектирован для запуска на ракете со стандартным 5-метровым обтекателем. Подойдёт и Atlas 5 от ULA и Falcon 9 от SpaceX. Модуль сможет доставить примерно 300 килограмм полезной нагрузки в полярные области Луны. Его полёт к нашему спутнику может занять от 3 до 6 суток. В ходе полёта будет выполняться проверка всех систем посадочного модуля и его полезной нагрузки.
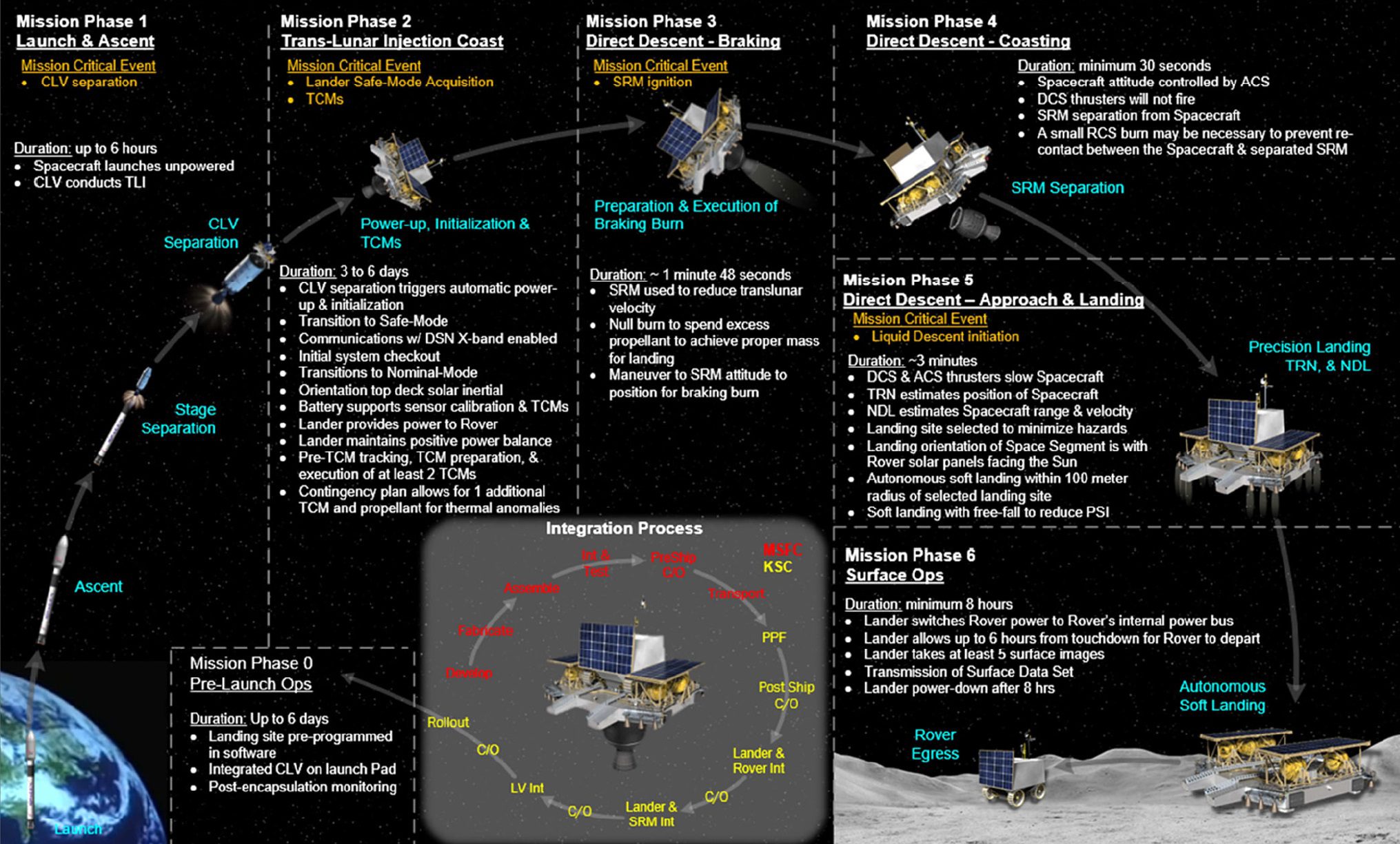
Спуск на поверхность Луны будет проходить в четыре этапа: торможение, снижение с уклоном, заход на посадку и посадка.
Для торможения будут использоваться двигатели на твёрдом топливе. Прямо перед началом снижения с уклоном они отделятся от аппарата. Это станет возможным благодаря двухсекционному расцепляющему механизму. «Активная» половина механизма отделится вместе с твердотопливной системой, а «пассивная» половина продолжит своё путешествие вместе посадочным аппаратом.
На этапах захода на посадку и посадки будут использоваться жидкостные подруливающие устройства системы управления спуском. Они ещё больше замедлят модуль и помогут ему совершить точную посадку в пределах обозначенного посадочного эллипса. После этого модуль сможет в течение 15 минут обеспечивать питание для лунохода. Затем луноход будет работать независимо.
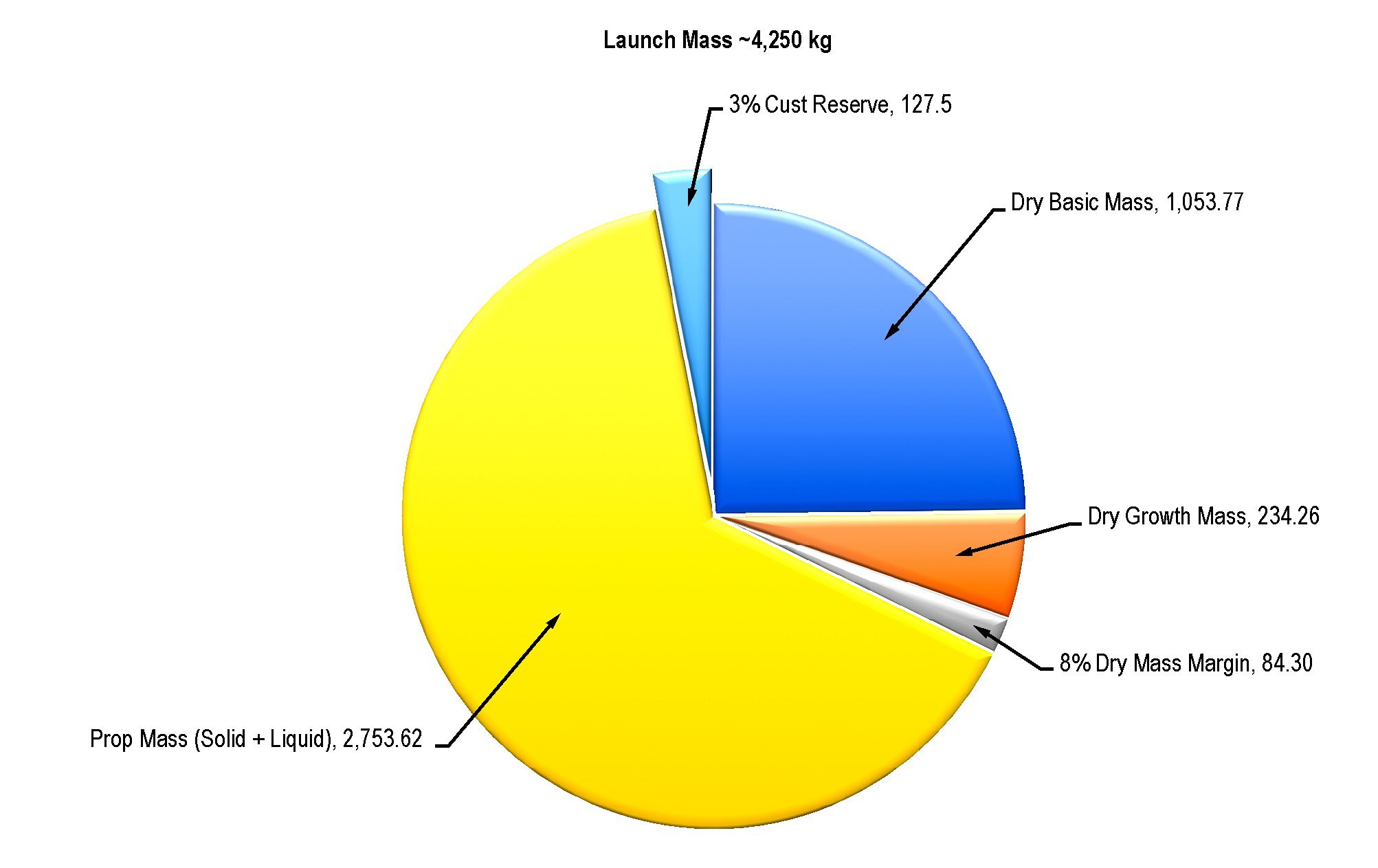
Для питания модуля энергией будут задействованы солнечные батареи., которые рассчитаны на мощность 670 Вт при минимальном потоке излучения (1326 Вт на квадратный метр). Масса одной солнечной панели – 7,8 килограмм. Для сохранения энергии будет использоваться литий-ионная ячейка LJ MJ1 с номинальной массой 20,7 кг и ёмкостью 78 А·ч.
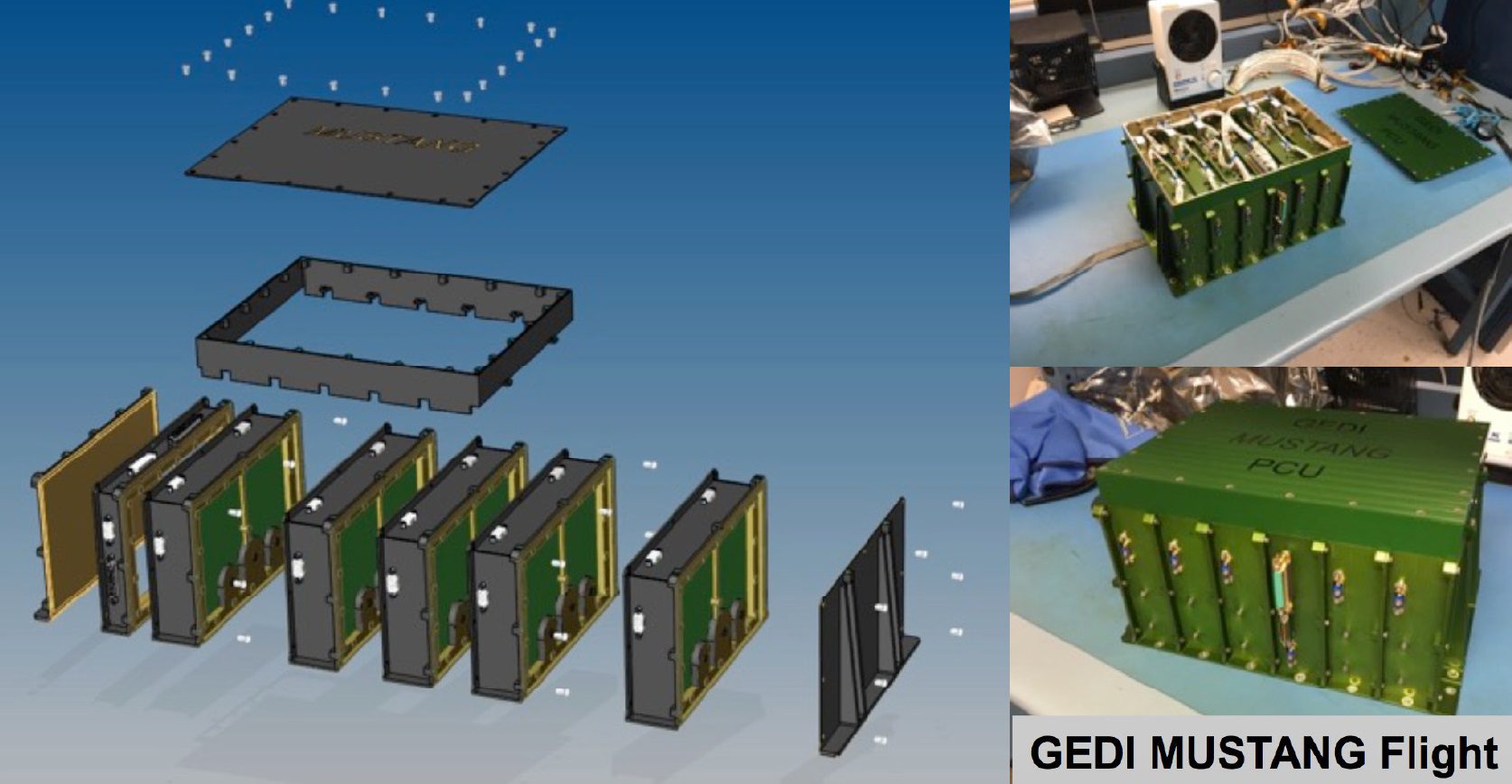
Авионика посадочного аппарата будет состоять из трех физических модулей: интегрированного блока авионики (IAU), системы контроля двигателей и узла интерфейса разделения (SEPIA).
IAU по сути служит бортовым компьютером и диспетчером для космического корабля. Этот блок будет реализован на платформе MUSTANG, разработанной в Центре космических полётов им. Годдарда.
Конструкция системы контроля двигателей обеспечит управление 8-ю двигателями для спуска, 12-ю двигателями ориентации и различными клапанами. Также эта система будет отвечать за последовательность отделения твердотопливных двигателей.
Модуль SEPIA будет следить за тем, чтобы спускаемый аппарат и его полезная нагрузка оставались выключенными во время запуска и чтобы он не включался до тех пор, пока не произойдёт отделение от второй ступени ракеты.

Пакет программного обеспечения (как и авионика) будет состоять из трёх частей: основного полётного ПО (FSW), ПО для моделирования (SSW) и ПО для тестирования (TSW).
FSW обеспечивает управление всеми динамическими функциями спускаемого аппарата на этапе его эксплуатации, за исключением включения питания, которое электромеханически контролируется SEPIA. Система FSW построена при помощи языка С на базе библиотеки программного обеспечения, называемой Core Flight Software (CFS). Эта библиотека предоставляет все сервисы и утилиты, обычно необходимые для космических полётов.
SSW поможет в принятии и проверке решений FSW, имитируя посадочный модуль и его окружающую среду. А TSW, в свою очередь, подсобит в тестировании и проверке решений FSW, предоставляя ей интерфейс управления данными.
Заключение
Свой вклад в разработку посадочного модуля внесли несколько исследовательских центров NASA. Результаты этой работы отражены в техническом документе, доступном широкой общественности. И учитывая тот факт, что NASA нацелено привлечь своих коммерческих партнёров к освоению Луны, космические компании могут извлечь некоторую большую выгоду из проделанной агентством работы.